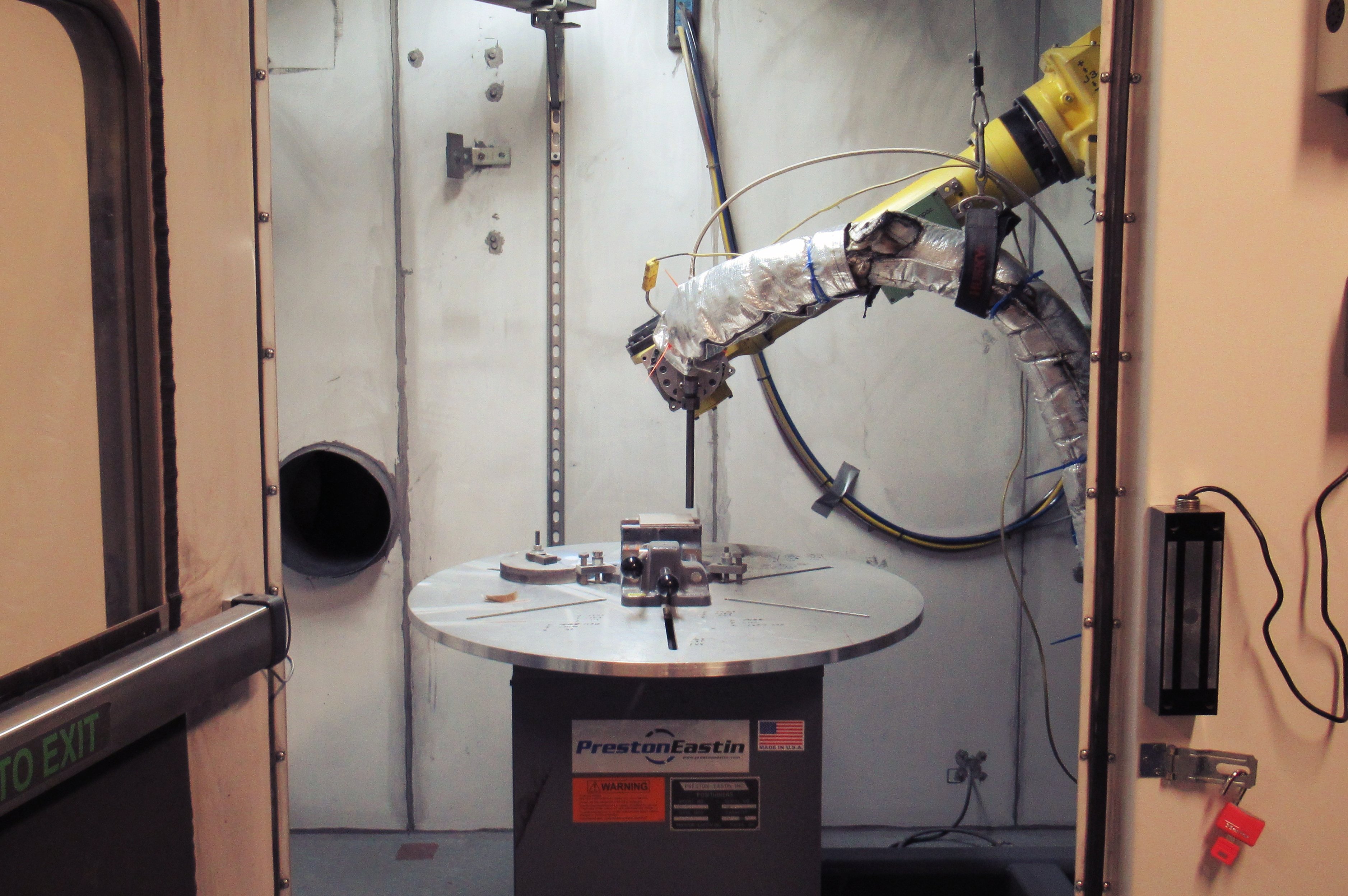
8 DOF system including a 6 DOF Fanuc robotic arm, a 1 DOF positioner, and a 1 DOF sensor mount

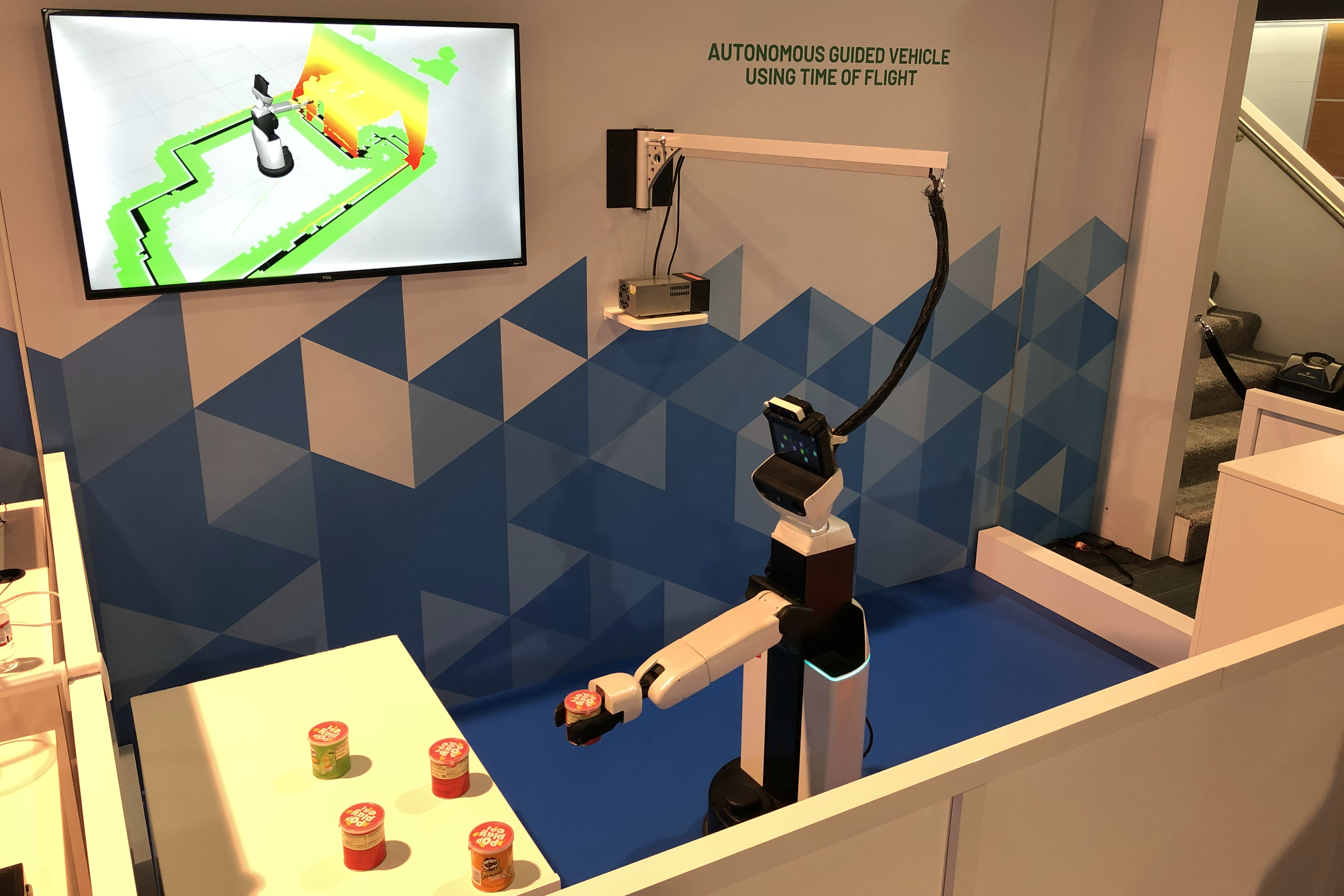
Human Service Robot (HSR) developed by Toyota with a holonomic mobile base and a 5 DOF robotic arm
Extensive experience working with ROS in research and course projects with commercially available robots.
Validated robotic motion algorithms with ROS using simulation tools such as Gazebo and RVIZ before running them on real hardware.
Tested and demoed robotics algorithms on real hardware. Configured ROS on a commercially available robot. Integrated and installed multiple grippers and LiDARs on robotic platforms.
Gordon Institute of Engineering Leadership fellow. Acted as interim team lead at Vecna and steadied the Robot Software team during a time of high-turnover.
Professional experience developing C++ Python and Matlab in robotics applications, C in embedded systems applications, and Java in software development applications.
Modeling experience using Solidworks for 3D printing. Parts created include a case for a PCB as well as ears and eys for a robotic panther.
College of Engineering, MS in Robotics Cumulative GPA: 3.833 Honors: Gordon Institute of Engineering Leadership Fellow Relevant Courses: Robotics Sensing & Navigation, Mobile Robotics, Assistive Robotics, Reinforcement Learning, Engineering Leadership
Swanson School of Engineering, BS in Computer Engineering, Minor in Mechanical Engineering Cumulative GPA: 3.871 Relevant Courses: Embedded System Design, Programming System Design on a Mobile Robot Platform, Image Processing
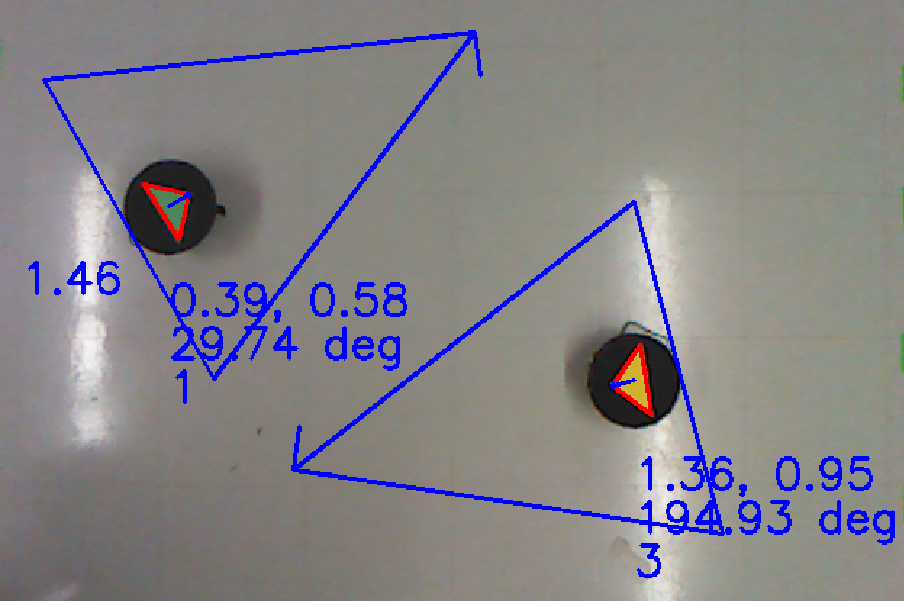
Jan 2020 - Las Vegas, Nevada Partnered with Analog Devices and Ascend Robotics to integrate new sensors into human-robot interaction research being carried out at Northeastern's RIVeR Lab. Presented this demo as part of the Analog Devices booth in the CES exhibit hall.
Nov 2019 - Paris, France Presented a poster about my research on using robotics for cold spray additive manufacturing and its applications to the aeronautics industry.
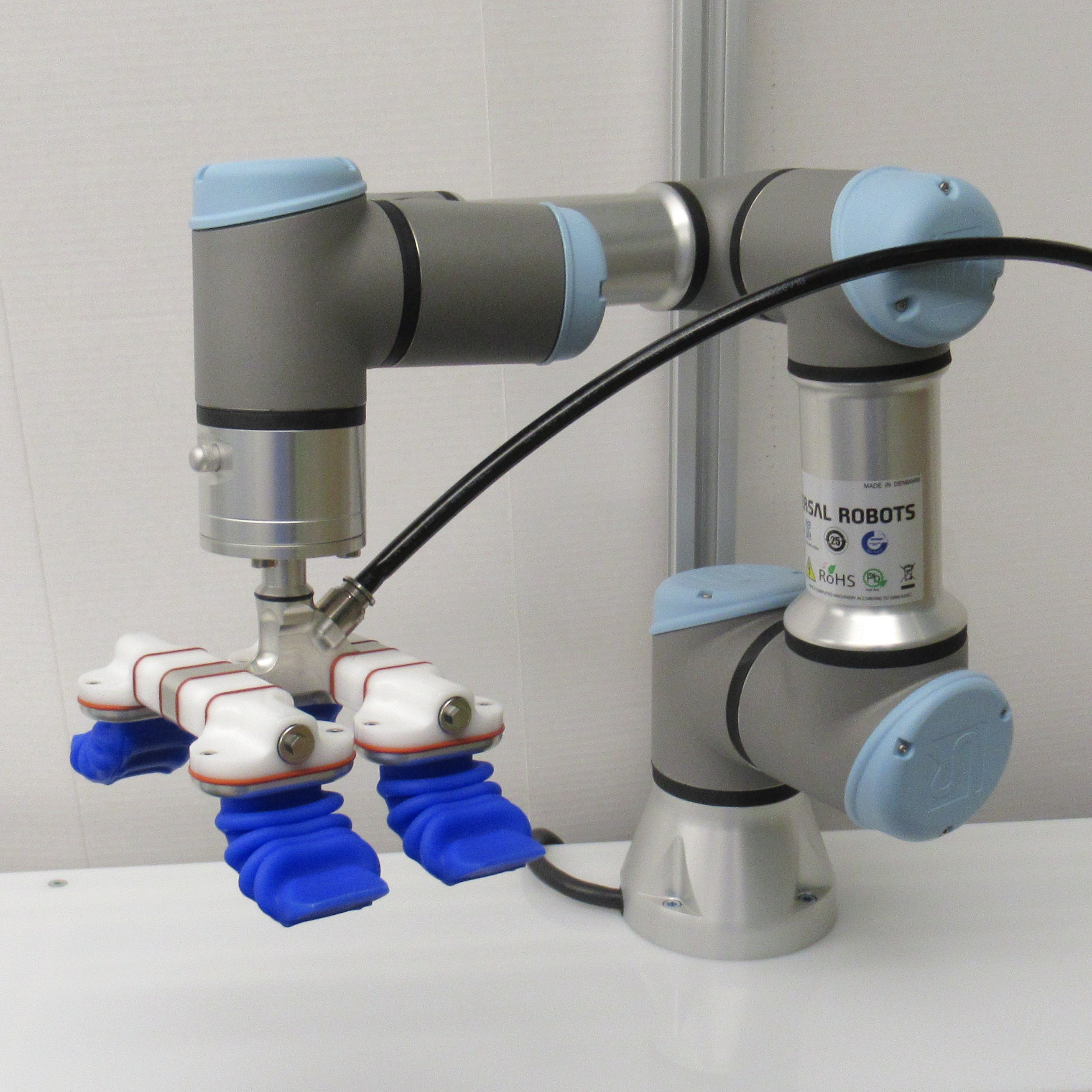
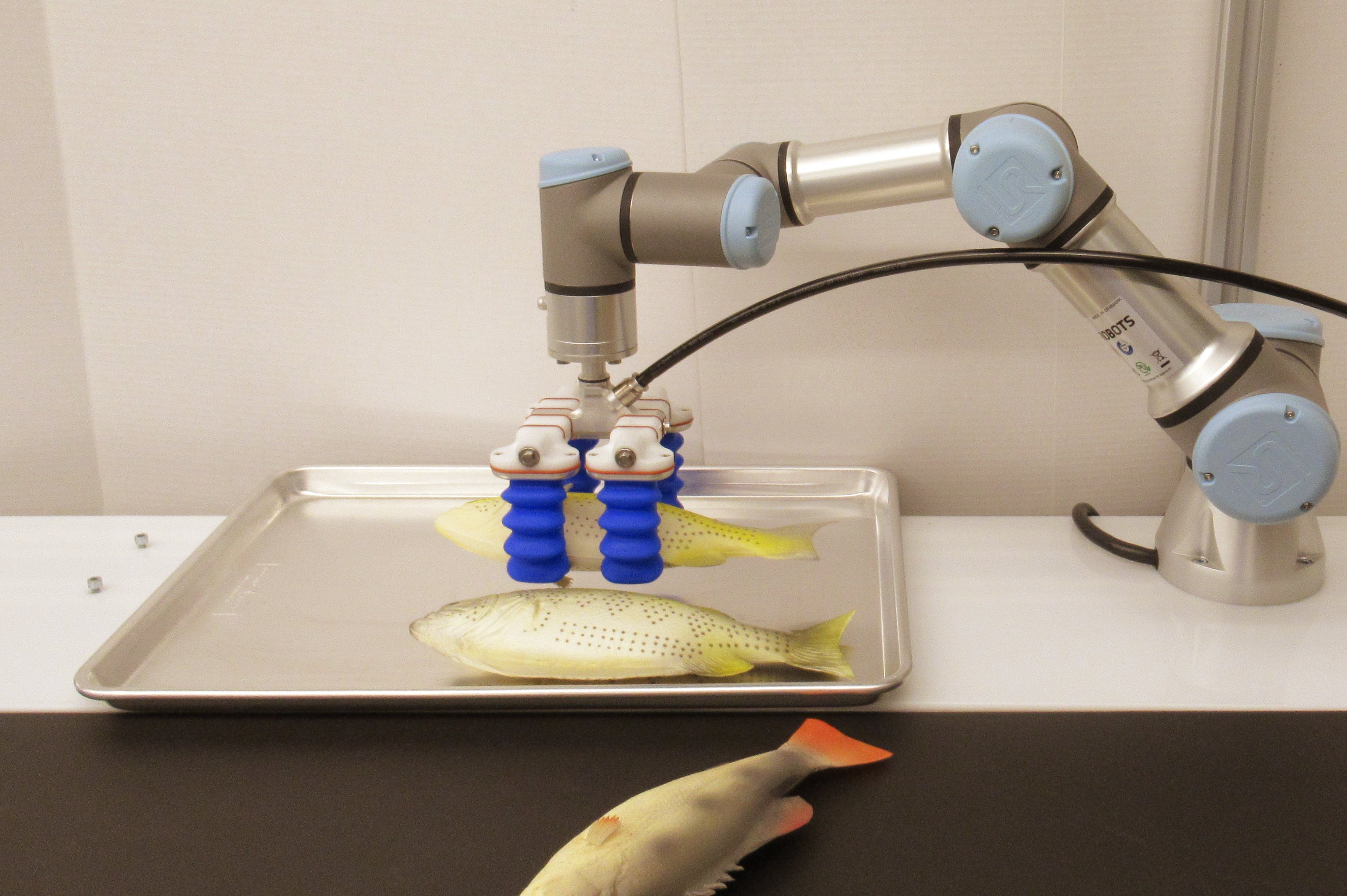
Nov 2019 - Pittsburgh, Pennsylvania Delivered a talk and presented a poster on our completed project to introduce robotic automation to seafood processing plants.
Jun 2019 - Las Vegas, Nevada Exhibited a demo of Northeastern's current robotics research over three days of the conference as part of the tech showcase.
Address
Phone #
Boston, MA
781 812 8630
joelynch523@gmail.com